If f:Rn→Rn is a transformation and
⋯,xt,xt+1,xt+2,⋯
is a sequence of vectors in Rn such that
xt+1=f(xt), then we say that f and
sequence
⋯,xt,xt+1,xt+2,⋯
make up a discrete dynamical system, where function f is called
dynamics and vectors {xt} are called states.
Figure 1.1: Classic billiards
example:classic-billiards
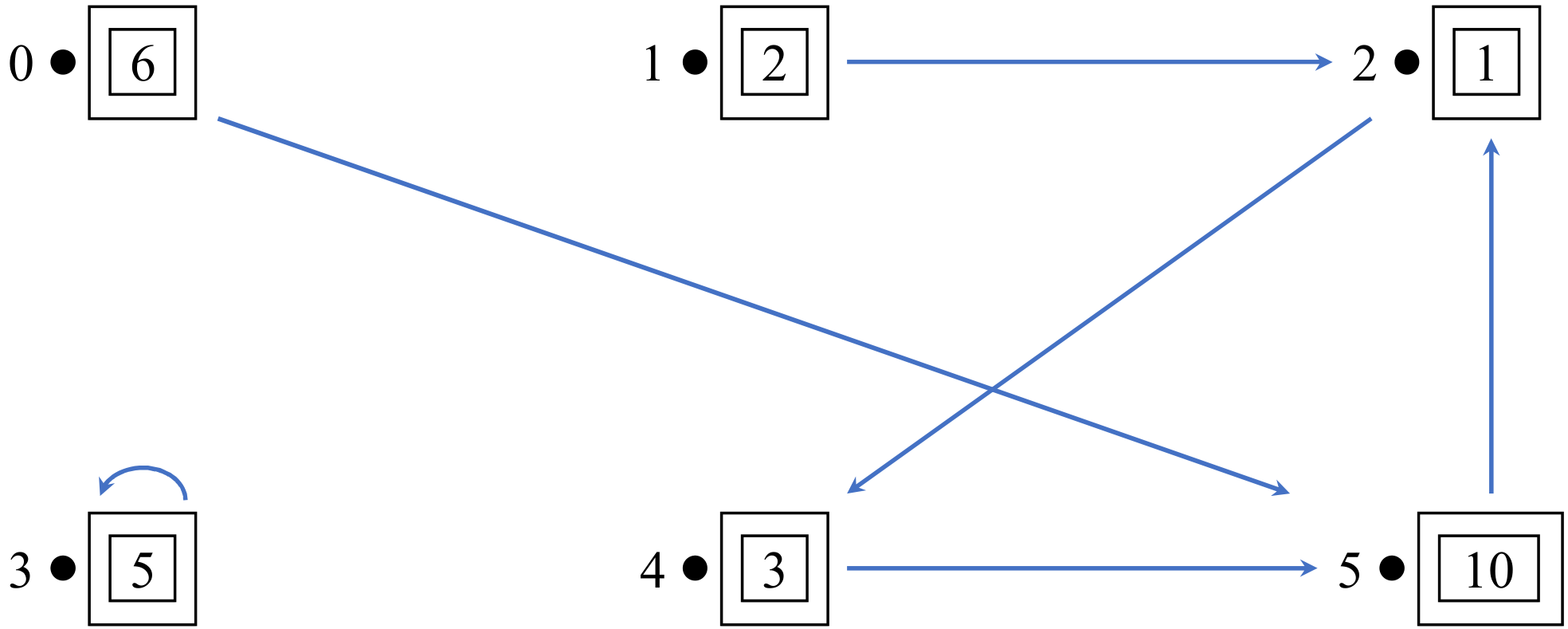
Let's consider a simple system described by a
simple (unweighted) directed graph together with some toy marbles.
There be 6 vertices in a graph and a total of 27 marbles. We might
place 6 marbles on vertex 0, 2 marbles on vertex 1, and the rest
as described by Figure
1.1.
We shall denote its deterministic state as
x=[6,2,1,5,3,10]⊤, and its dynamics as a
Boolean adjacency matrixM=000001001000000010000100000001001000 where M(i,j)=1 if and only if there is an
arrow from vertex j to vertex i.
The state evolvement can be represented as matrix multiplication:
xt+1=f(xi)=Mxt
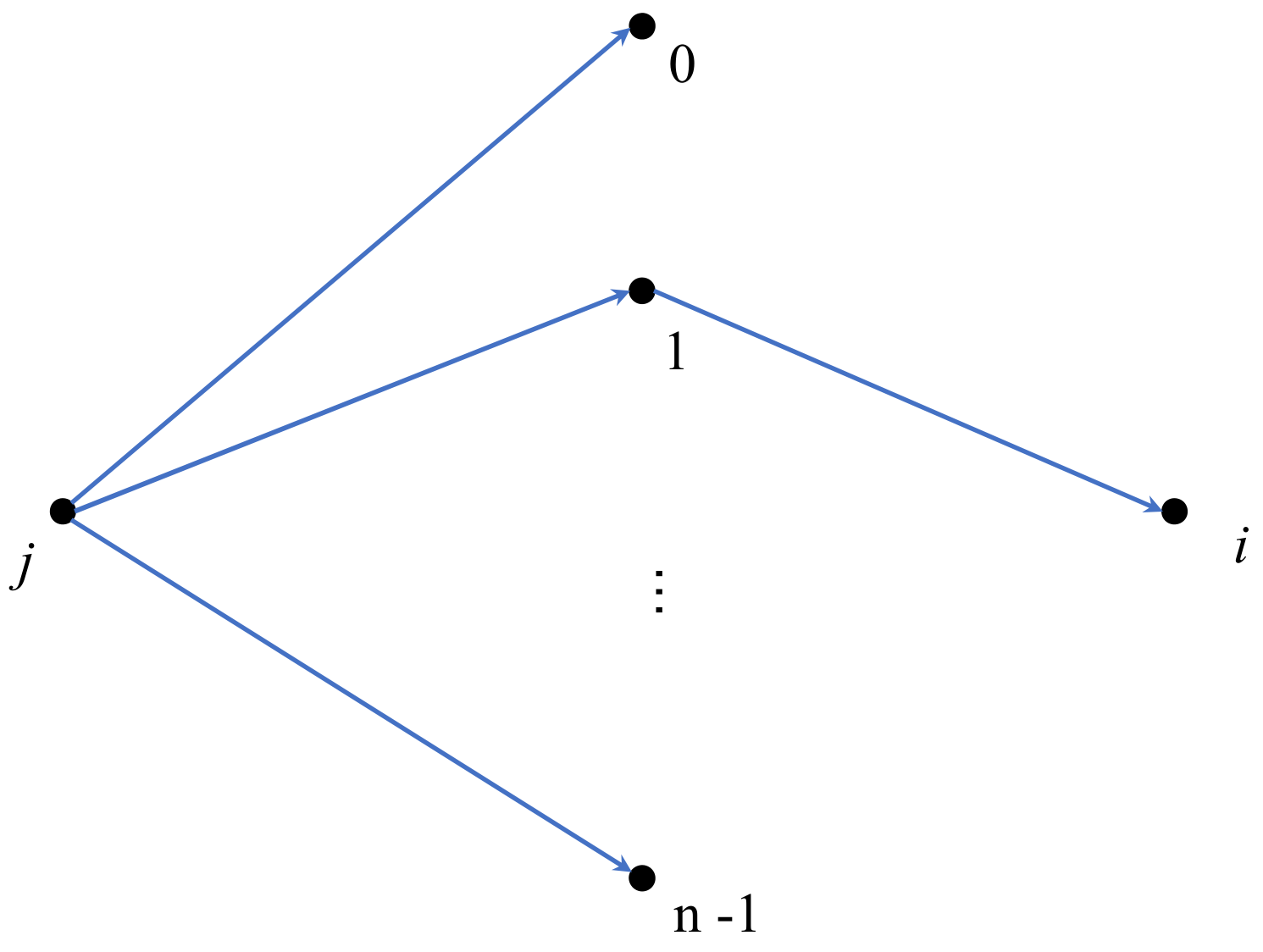
The multiple step dynamics can be written as Boolean matrix
multiplication:
M2(i,j)=⋁k=0n−1M(i,k)∧M(k,j)
where ∨ and ∧ represent Boolean "OR" and "AND" operators,
and M2(i,j)=1 if and only if there is a path of length 2
from vertex j to vertex i as shown in Figure
1.2.
The state of a probabilistic system is composed of probabilistic
entries, and the sum of all entries is 1.
example: probabilistic system
x=[51,103,21]⊤
one-fifth chance that the marble is on vertex 0;
three-tenths chance that the marble is on vertex 1;
half chance that the marble is on vertex 2.
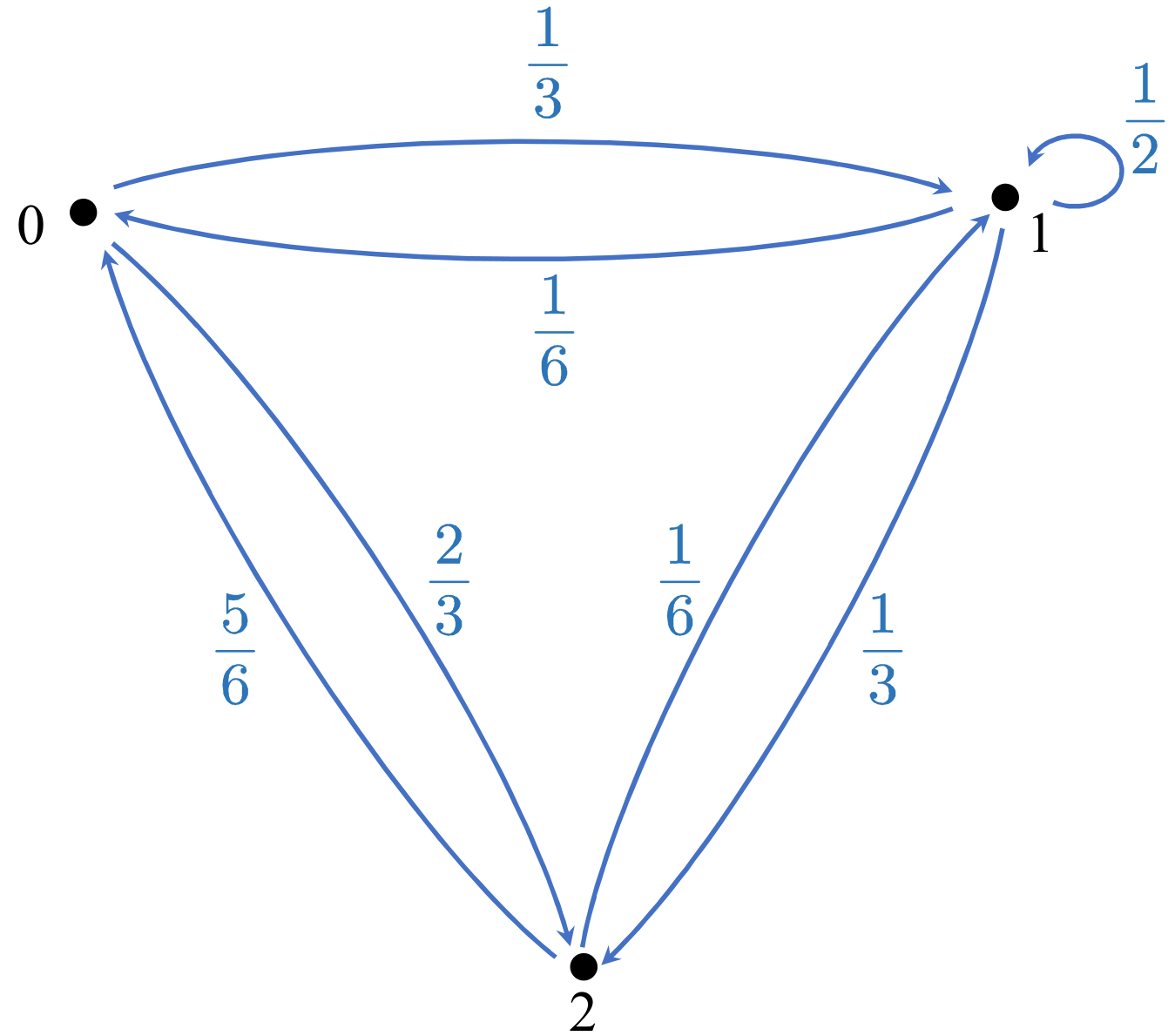
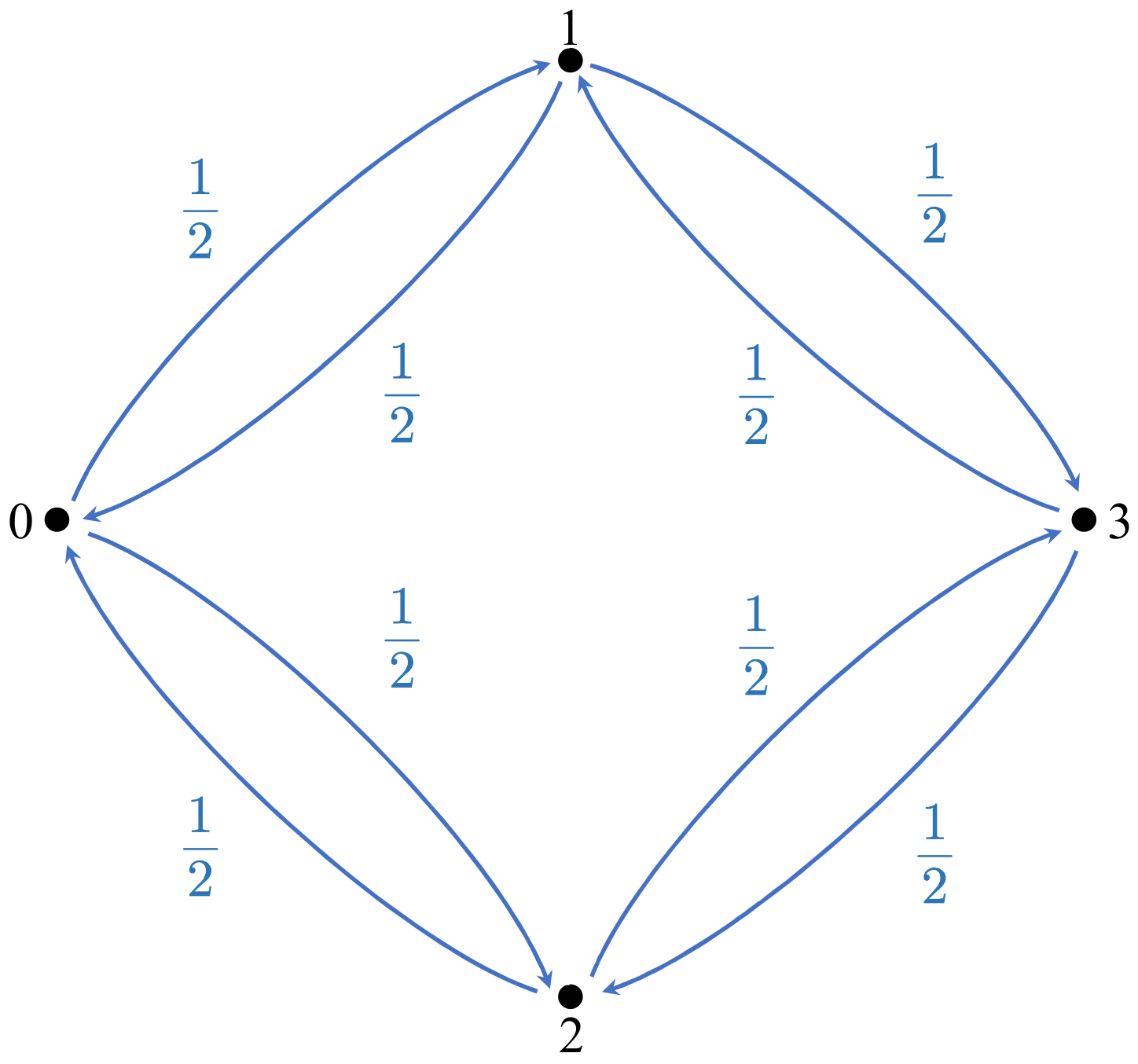
The dynamics of a probabilistic system is described by a directed
(probabilistic) weighted graph, where several arrows shooting out of
each vertex with real numbers between 0 and 1 as weights as shown in
Figure 1.3. The corresponding matrix is
called doubly stochastic matrix, which has the following two
properties:
The column sum, i.e., the sum of all weights leaving a vertex, is 1;
The row sum, i.e., the sum of all weights entering a vertex, is 1.
Figure 1.3: probabilistic system
The state evolvement. If we have xt expressing the
probability of the position of the marble at time t and M
expressing the probability of the way the marble moves around, then
xt+1=Mxt is expressing the
probability of the marble's location at time t+1.
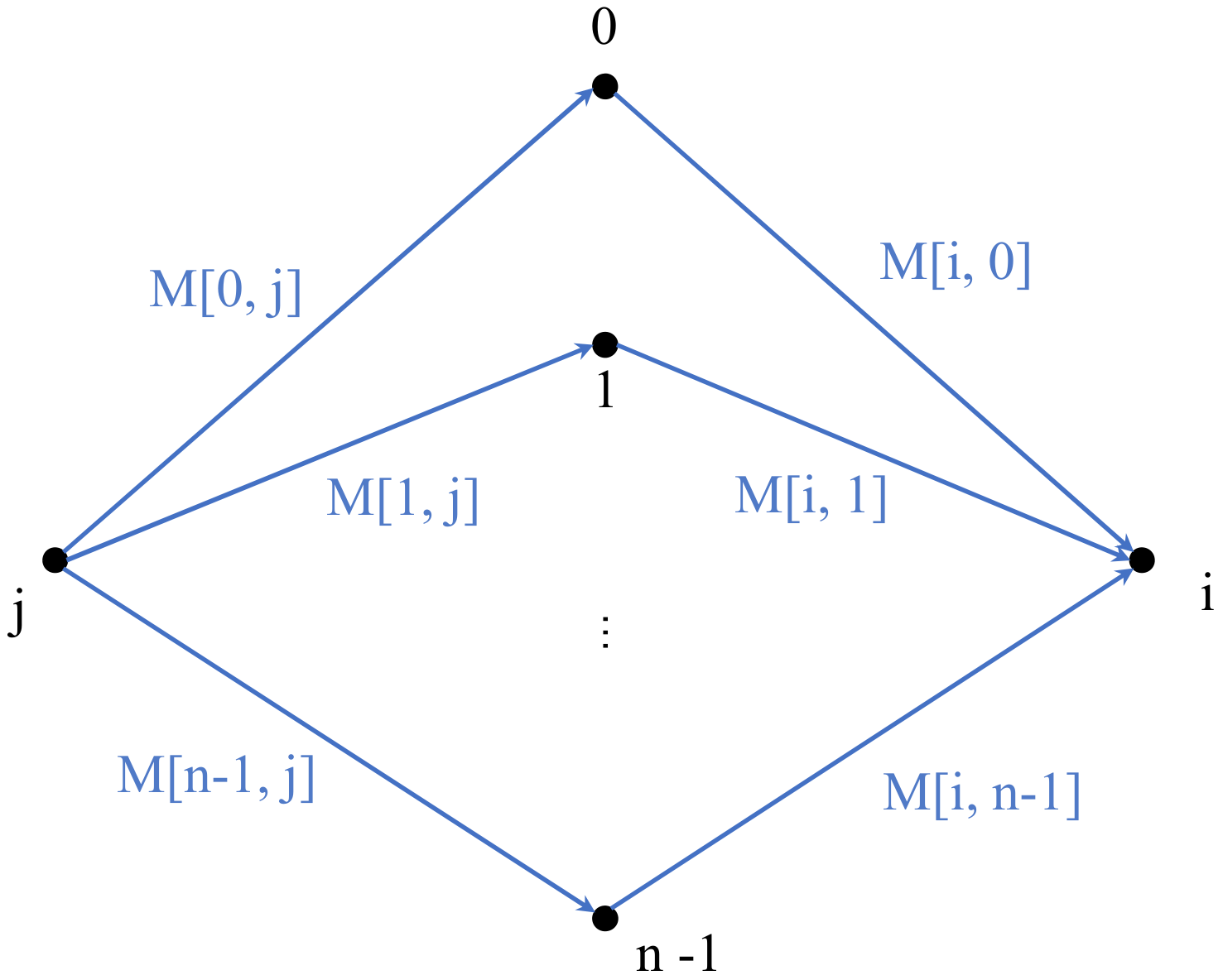
The multiple step dynamics of probabilistic system is formulated
with matrix multiplication with probability entries (a.k.a., normal
matrix multiplication). Figure
1.4 shows an example of the
2-step dynamics.
Figure 1.4:The 2-step dynamics in the probabilistic system Figure 1.5: stochastic-billiard
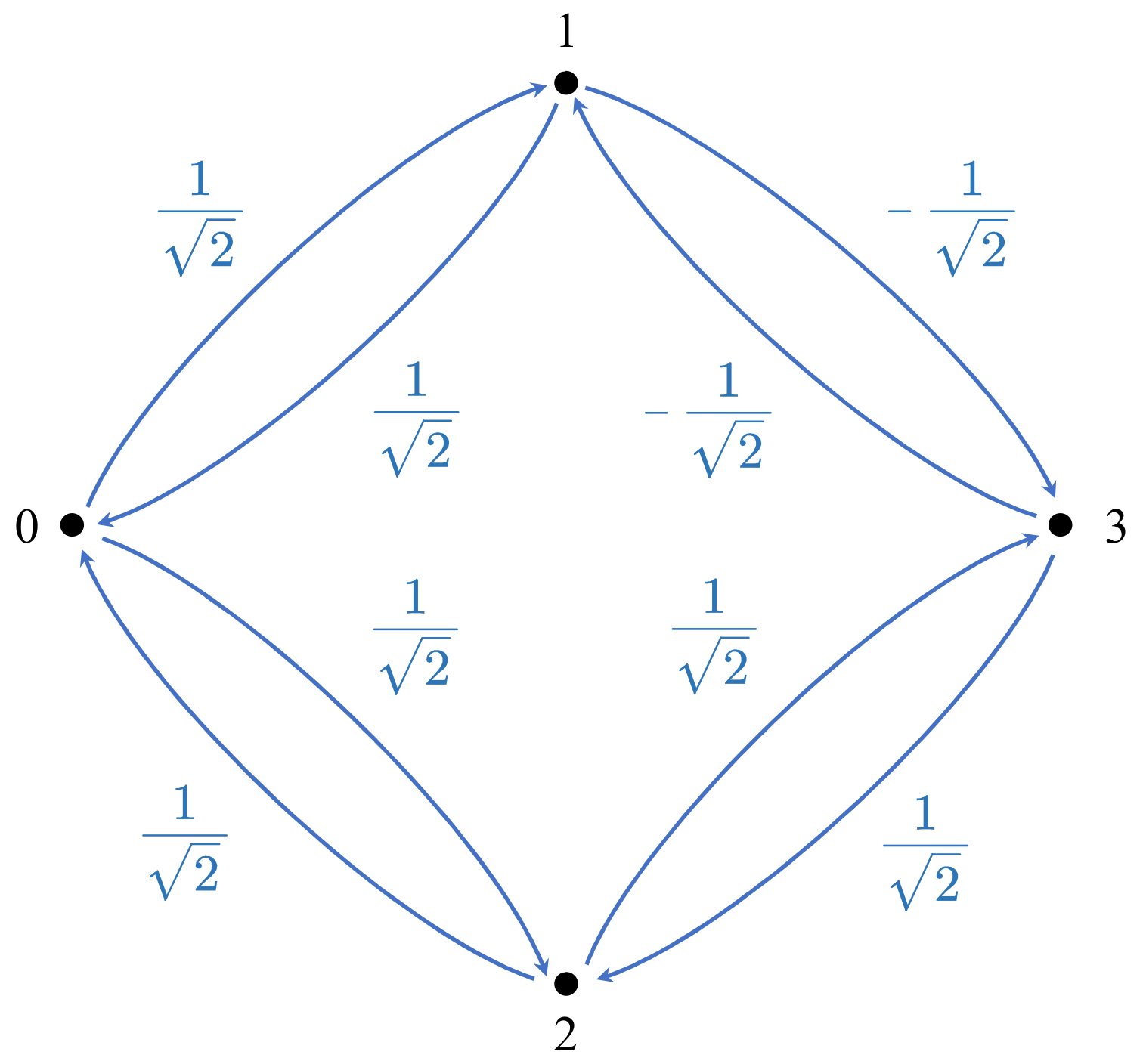
example: stochastic-billiard
Consider a stochastic billiard with dynamics
shown in Figure 1.5 and initial state
x0, its state evolvement procedure exhibits periodic
cycles as follows:
x0=[1000]⊤⟼Mx1=[021210]⊤⟼Mx2=[210021]⊤⟼Mx3=x1⟼Mx4=x2⟼M⋯
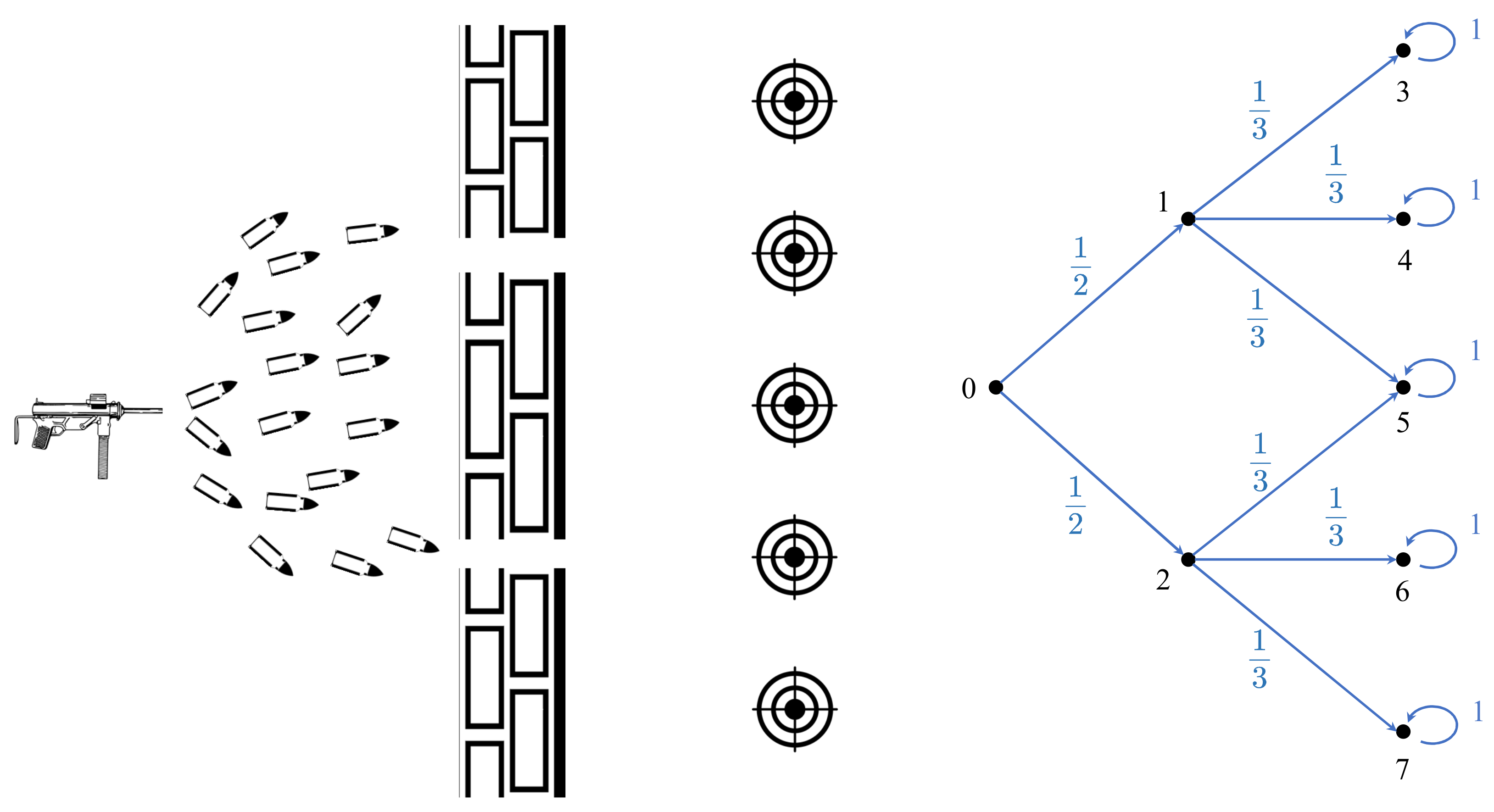
Figure 1.6: probabilistic-double-silt
example:probabilistic-double-silt
Assume a virtual double silt experiment as shown in Figure
1.6. The bullets are fired from
the machine-gun, pass through two narrow slits in the wall, and
eventually land on the targets behind the wall. Its dynamics matrix can
be formulated as M=021210000000031313100000003131310000000000000000000000000000000000000000 and accordingly, its 2-step dynamics
can be computed by matrix multiplication:
M2=M×M=0006161316161000313131000000003131000100000000110000000000000000100000001 Hence, given an initial state
x0=[10000000]⊤, its 2-step transition state
x2=M2x0=[0006161316161]⊤.
Note that the probability of the bullets landing on the middle target is
the largest, i.e., 31. This is consistent with
our knowledge because both routes can reach this target, meaning a
summation of probabilities.
The state of a quantum system is composed of quantum entries
(complex values), whose modulus square represents the probability, and
the sum of modulus squared of all entries is 1.
example:quantum-state
Consider a complex vector x=[31,152i,52]⊤,
since
x†x=31+154+52=1,
it is a qualified state vector of a quantum system.
The dynamics of a quantum system also has two representations. One
is the graph form, which can be described by a directed (complex)
weighted graph. The other is the matrix form, which corresponds to a
special unitary matrix whose modulus square is a doubly stochastic
matrix as exemplified in Figure
1.7.
Figure 1.7: quantum-system
Table below gives a detailed comparison of three
systems in terms their states and dynamics. In particular, the dynamics
is represented in two different forms, which are graph (Gra.) and matrix
(Mat.), respectively.
Classic Deterministic System
Probabilistic System
Quantum System
State
x=[x1,x2,x3]⊤, xi∈N
x=[p1,p2,p3]⊤, xi∈[0,1],∑ipi=1
x=[c1,c2,c3]⊤,ci∈C,∑i
Dynamics (Gra.)
Directed unweighted graph
Directed (probabilistic) weighted graph
Directed (complex) weighted graph
Dynamics (Mat.)
Boolean adjacency matrix
Doubly stochastic matrix
Unitary matrix whose modulus squares is a doubly stochastic matrix
The state evolvement is formulated as matrix multiplication
xt+1=Mxt.
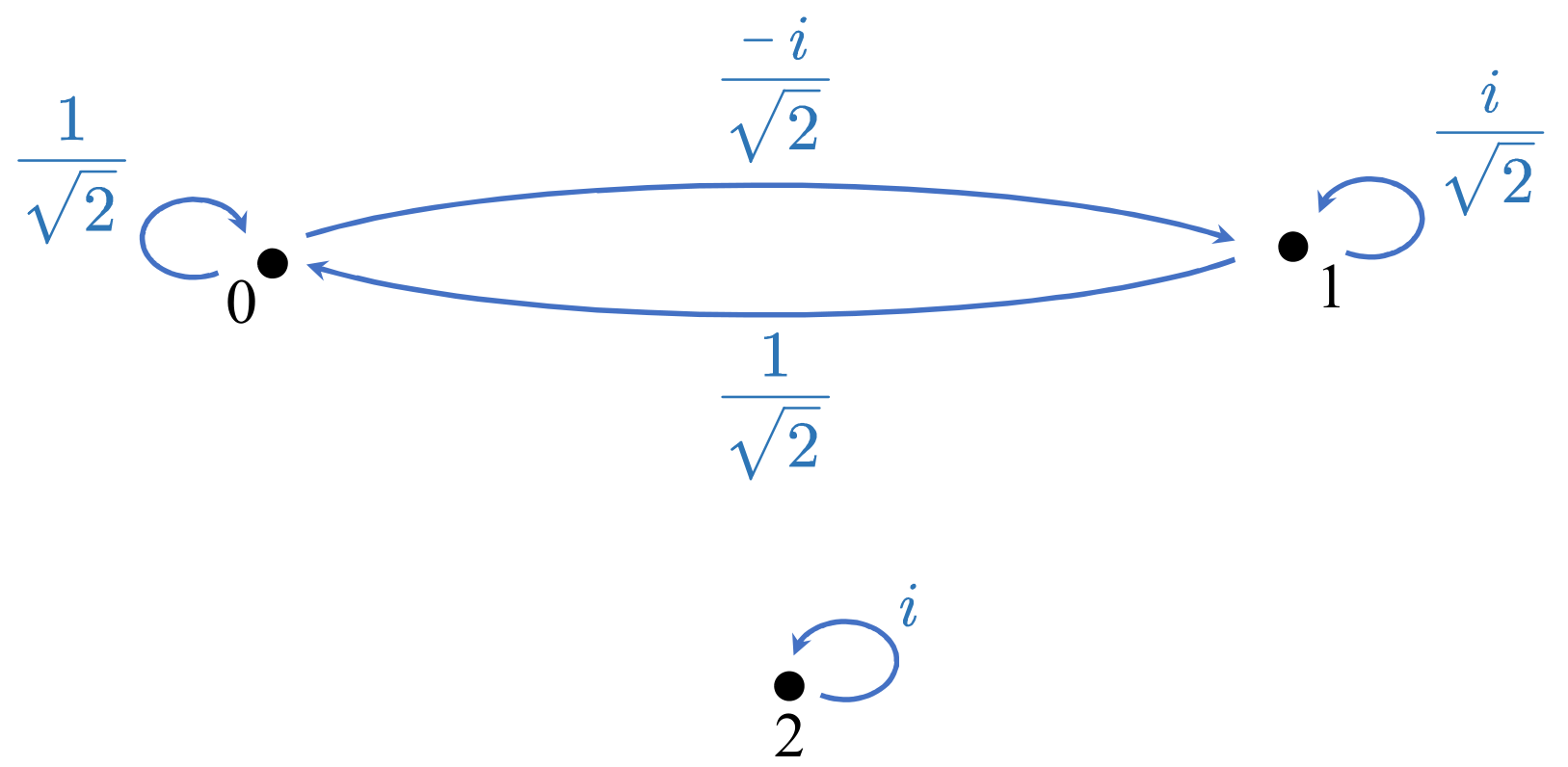
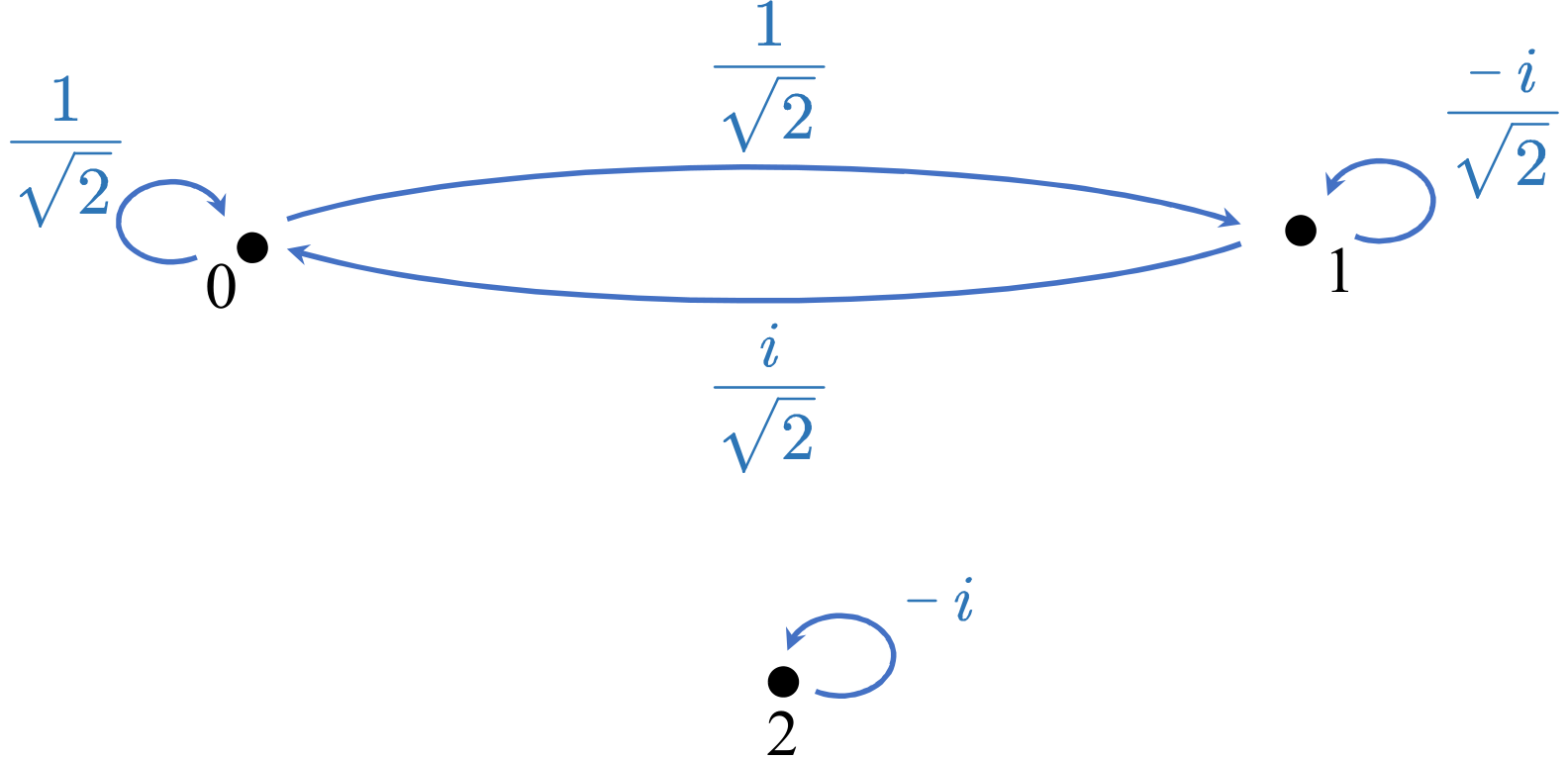
The forward dynamics and backward dynamics can be represented as
a matrix M and its adjoint M† as shown in the following
Table. This means that if you perform some
operation x↦Mx and then
"undo" the operation
M†Mx=Ix=x,
you will find yourself (with probability 1) in the same state with which
you began.
Dynamics graph
Dynamics Matrix
Forward dynamics
M=212−i0212i000i
Backward dynamics
M=212102i2−i000−i
Figure 1.8: quantum billiard
example
Consider a quantum billiard with dynamics shown in
Figure 1.8 and initial state
x0, its state evolvement procedure exhibits periodic
cycles as follows: x0=[1000]⊤⟼Mx1=[021210]⊤⟼Mx2=x0⟼Mx3=x1⟼M⋯
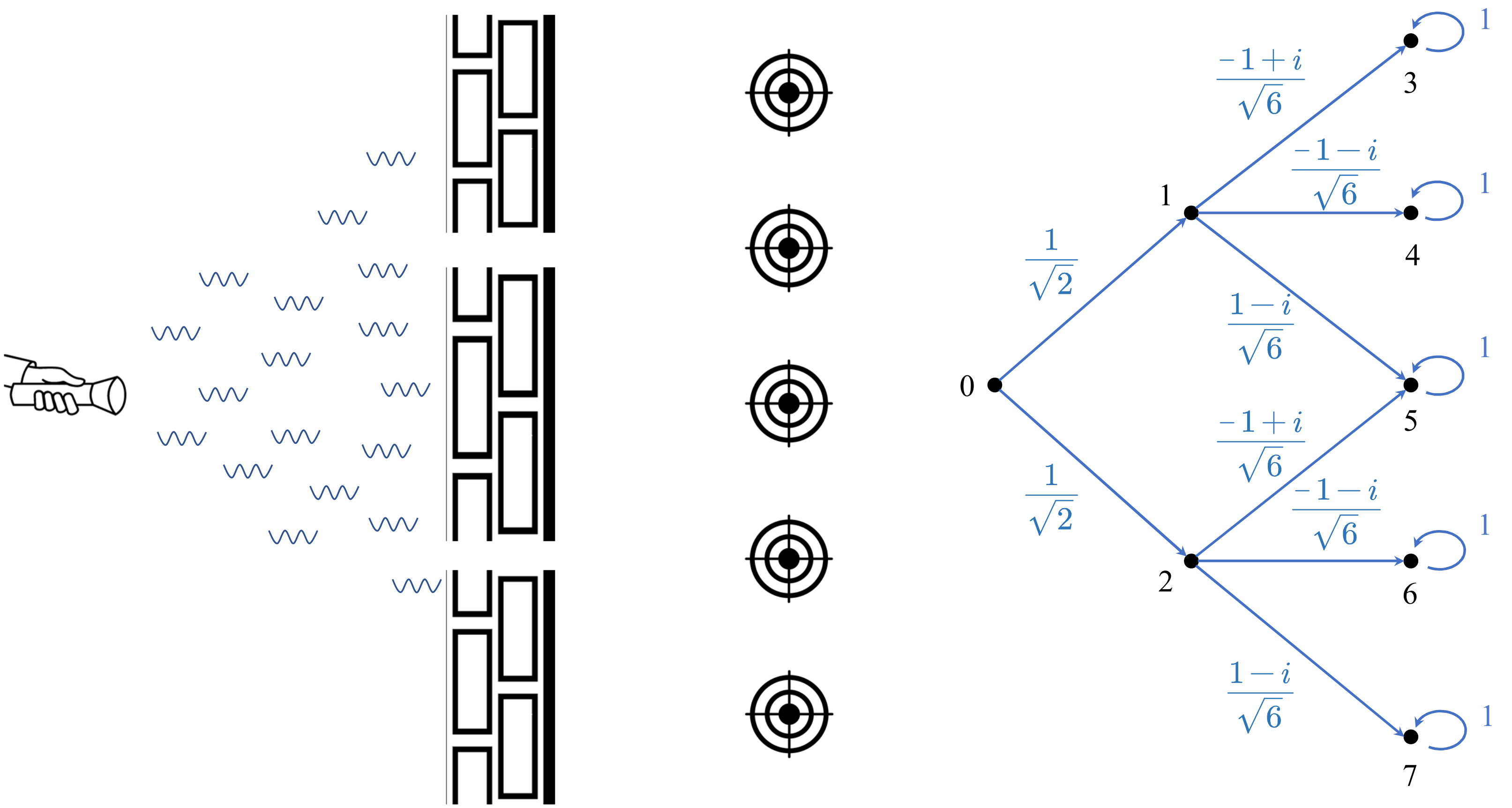
Figure 1.9: Double slit experiment
example
Given a double silt experiment as shown in Figure
1.9. The photons are ejected from the
flashlight, pass through two narrow slits in the wall, and eventually
land on the screens behind the wall. Its 1-step and 2-step dynamics
matrices are respectively M=02121000000006−1+i6−1−i61−i00000006−1+i6−1−i61−i0001000000001000000001000000001000000001↦M2=00012−1+i12−1−i012−1−i12−1+i0006−1+i6−1−i61−i00000006−1+i6−1−i61−i0001000000001000000001000000001000000001 Note that
M(5,0)=21(61−i)+21(6−1+i)=121−i+12−1+i=120=0,
which is called interference phenomenon.
Superposition. Let the state of the system be given by
x=[c0,c1,⋯,cn−1]⊤∈Cn. It
is incorrect to say that the probability of the photon's being in
position k is ∣ck∣2. Rather, to be in state x means
that the particle is in some sense in all positions simultaneously.
The photon passes through the top slit and the bottom slit
simultaneously, and when it exits both slits, it can cancel itself out.
A photon is not in a single position, rather it is in many positions, a
superposition.
Measurement and collapse. The reason we see particles in one
particular position is because we have performed a measurement. When we
measure something at the quantum level, the quantum object that we have
measured is no longer in a superposition of states, rather it collapses
to a single classical state. So we have to redefine what the state of a
quantum system is: a system is in state x means that
after measuring it, it will be found in position i with probability
∣ci∣2.
Power of quantum computing. It is exactly this superposition of
states that is the real power behind quantum computing. Classical
computers are in one state at every moment. Imagine putting a computer
in many different classical states simultaneously and then processing
with all the states at once. This is the ultimate in parallel
processing!